飞行器装载了LightBridge3模块后,在使用过程中,LightBridge3内部的计算机单元会运行OSDK相关程序,能够设置或获取无人机飞行控制器的参数与无人机使用的定位系统的数据,从而实现对飞行器基础控制与运动规划等,如自动起飞、自动降落、自动返航、航点任务等功能。
PC端QGC地面站的连接
① 如要使用PC端的QGC地面站软件进行飞行器的控制和使用,需要先与遥控器进行数据物理线路的连接,之后通过遥控器进行与飞行器的通信和数据交互,使用网口连接线缆连接遥控器网口与电脑以太网网口,与电脑建立网络连接,如图所示:
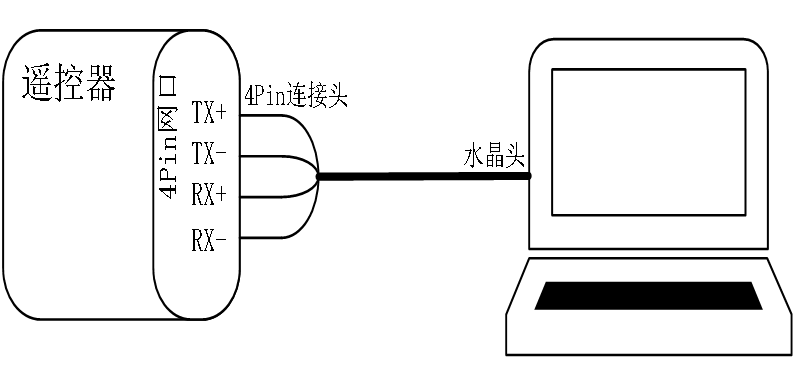
遥控器与PC网口连接图
② 完成遥控器与PC端的网口物理连接后,需在PC上对以太网进行相应配置,打开电脑设置->点击适配器->选择以太网->选择IPV4协议->选择自定义IP地址->按图中的方式输入->点击确认(见下图)
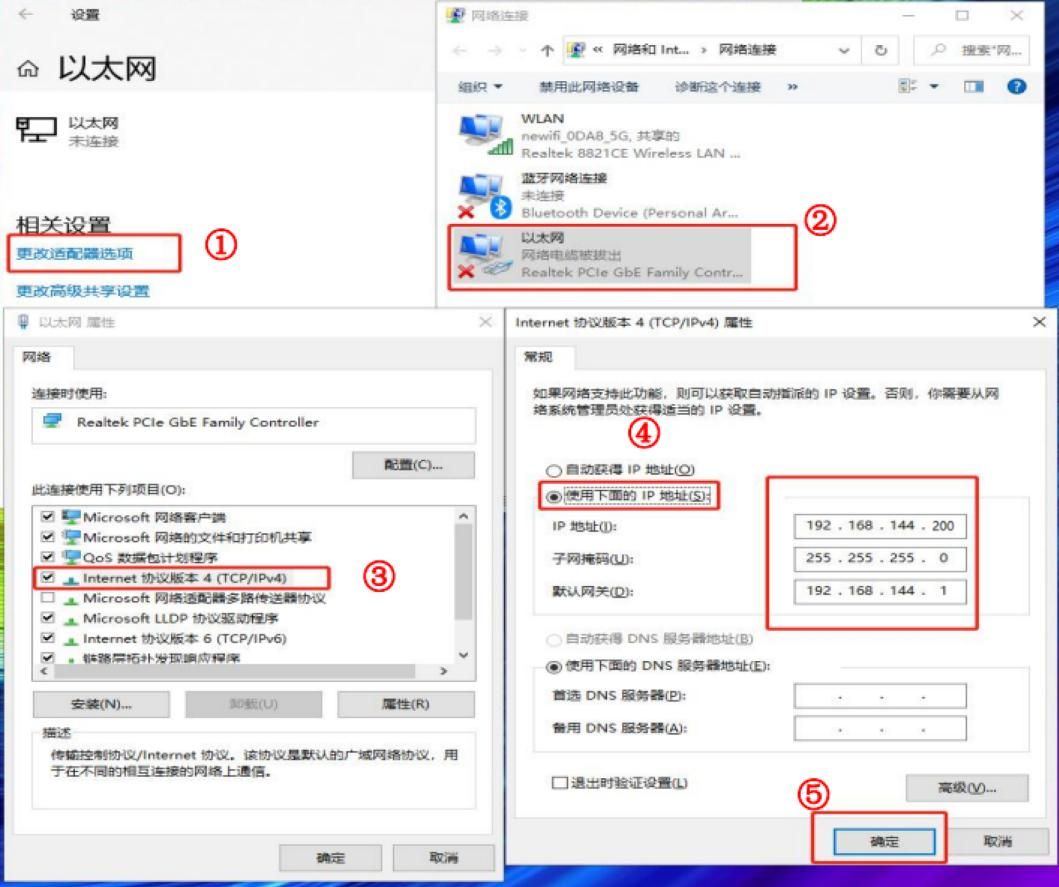
PC端以太网设置图
③ 打开电脑QGC软件,点击左上角Q图标,在下拉菜单栏中选择Application Settings选项。如图所示:
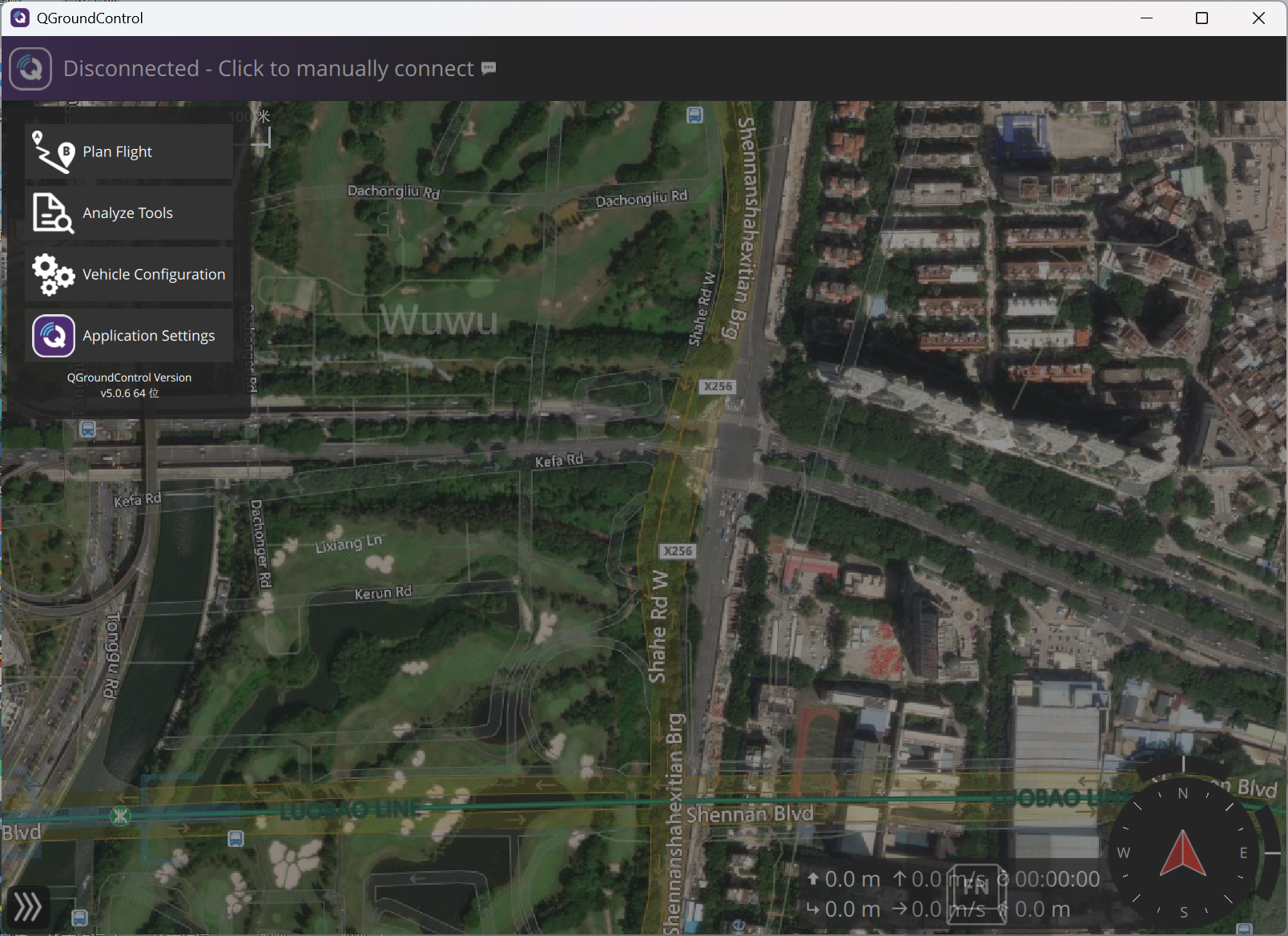
PC端QGC软件连接选项图
④ 点击通讯连接选项,点击添加按钮来进行连接方式的添加。如图:
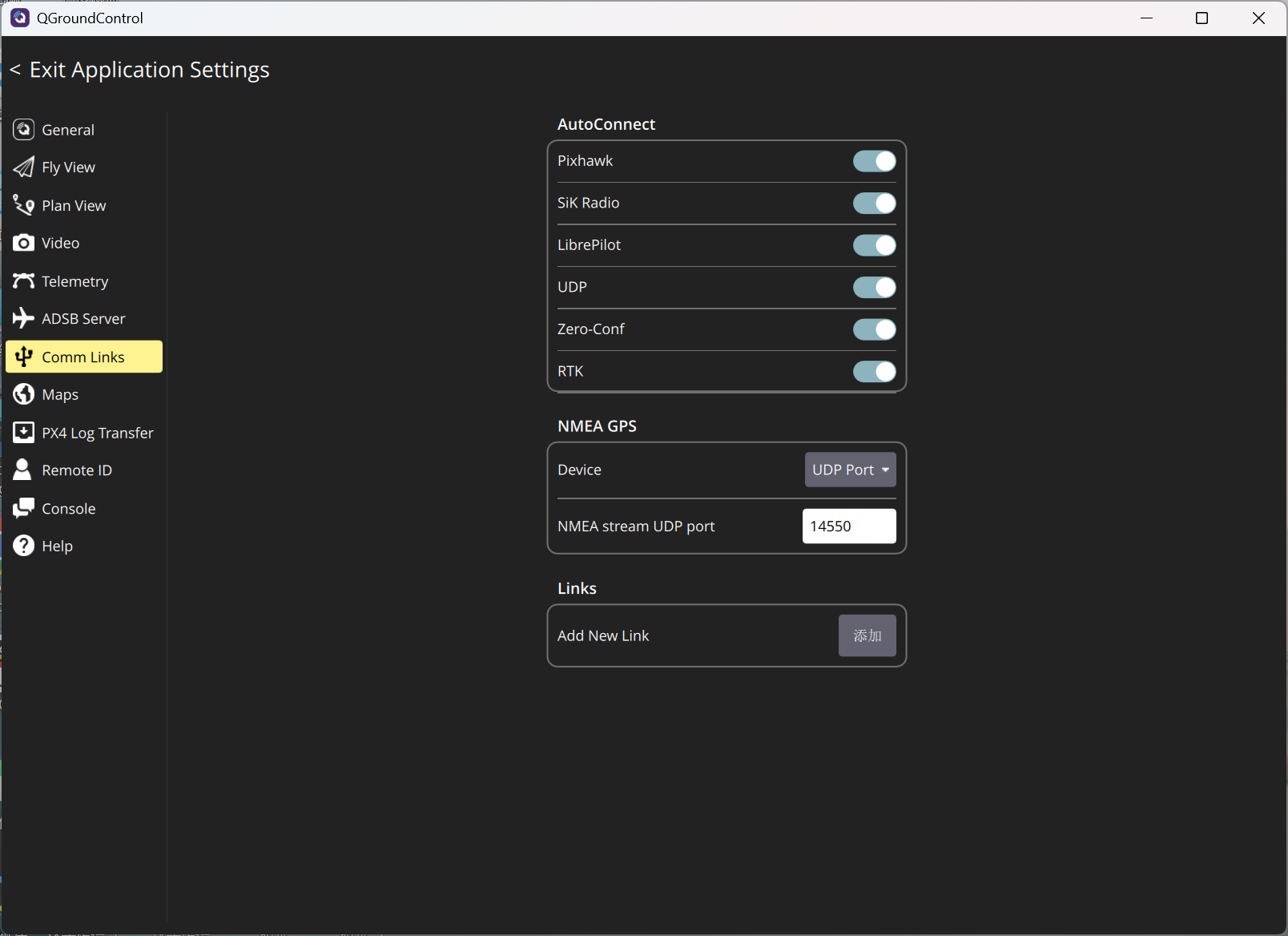
PC端QGC软件通讯设置界面图
⑤ 自定义名字,选择连接类型为UDP,端口号为14550,设置UDP服务器端IP地址为LightBridge3内部计算单元的静态IP地址,即:192.168.144.10:14550,设置完成后点击Add Server,点击保存后回到上层界面,点击连接,即可,如下图所示:
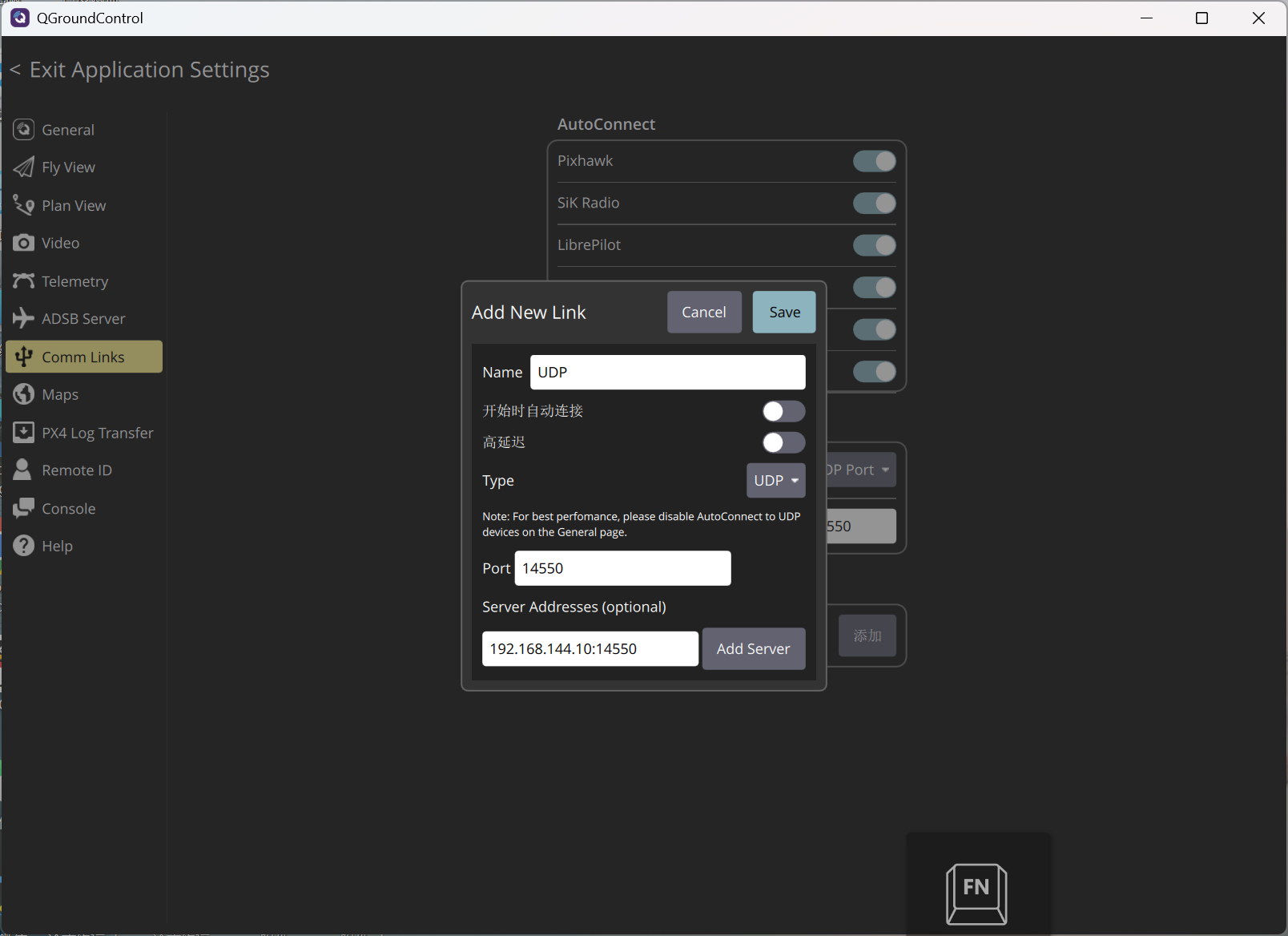
PC端QGC软件通讯设置图
⑥ 点击视频选项,按照如下所示进行设置,即可在QGC地面站软件中实时显示云台相机的画面,其中192.168.144.108为云台相机的IP地址。
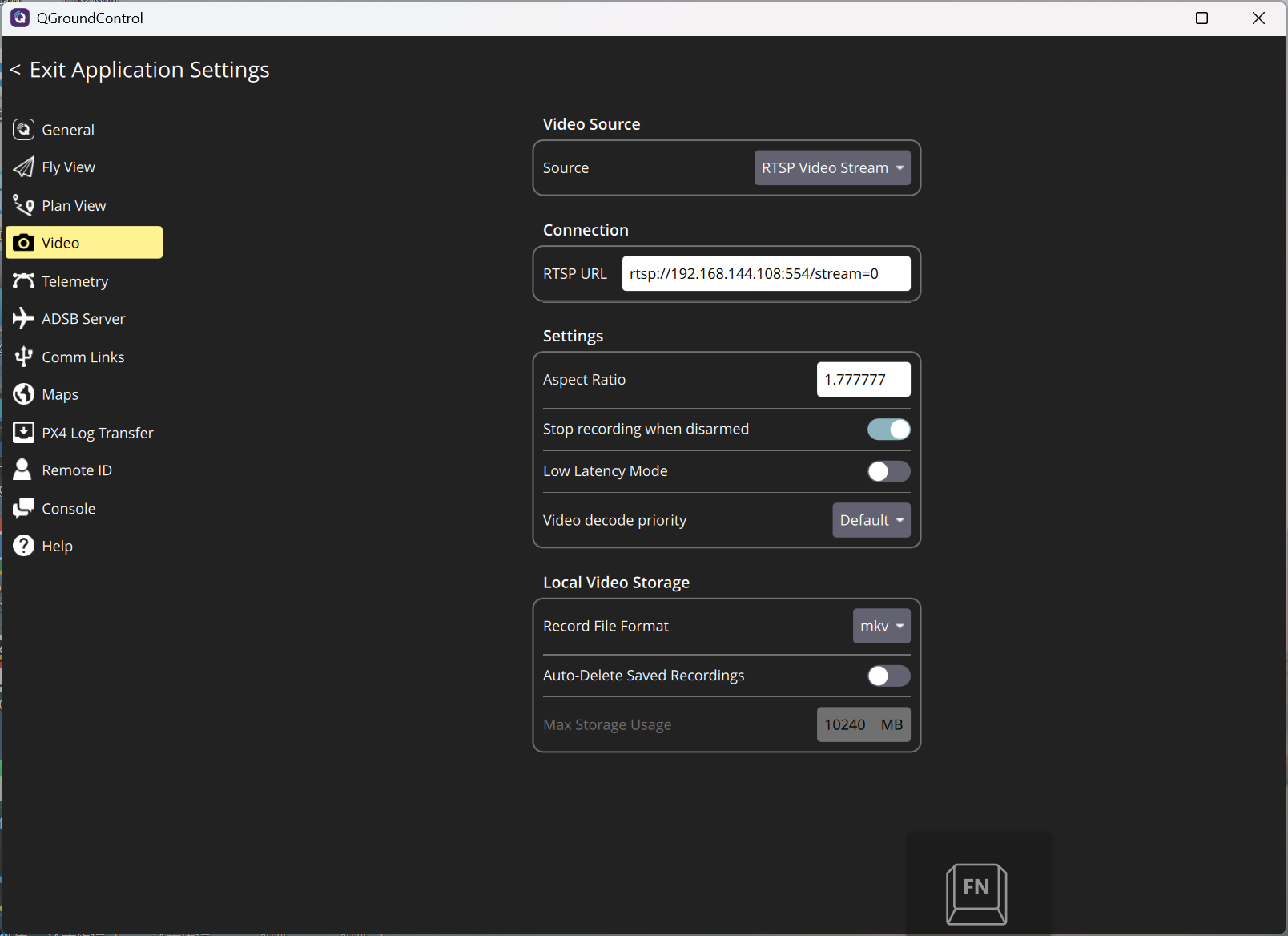
PC端QGC软件视频设置图
PC端共享图传
① 按照上述连接遥控器与电脑后,下载软件VLC来显示图像。

VLC软件截图
② 打开电脑VLC软件,在媒体中选择网络串流。

VLC软件截图
③ 在网络 URL 的输入栏中,输入 rtsp://192.168.144.108:554/stream=0 后点击播放。
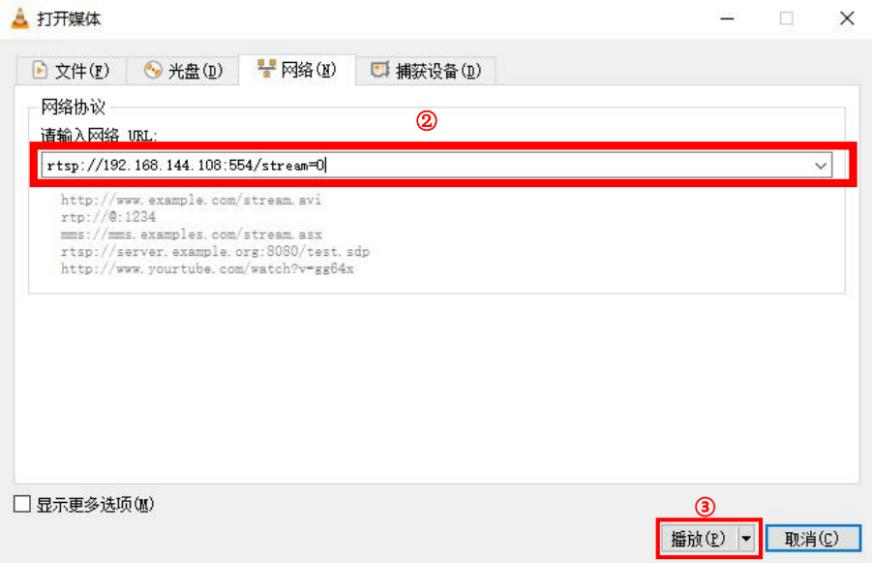
VLC软件截图
PC端QGC地面站的使用
1.自动起飞功能
当飞行器满足自动起飞条件时,解锁电机后,在地面站软件中点击起飞图标,滑动滑块确定后飞行器将自动起飞。GPS模式下,飞行器自动起飞后悬停在距离地面1.2米的位置等待遥感指令;STABILIZE模式下,飞行器自动起飞后悬停在距离地面1.2米的位置等待遥感指令。如图所示:
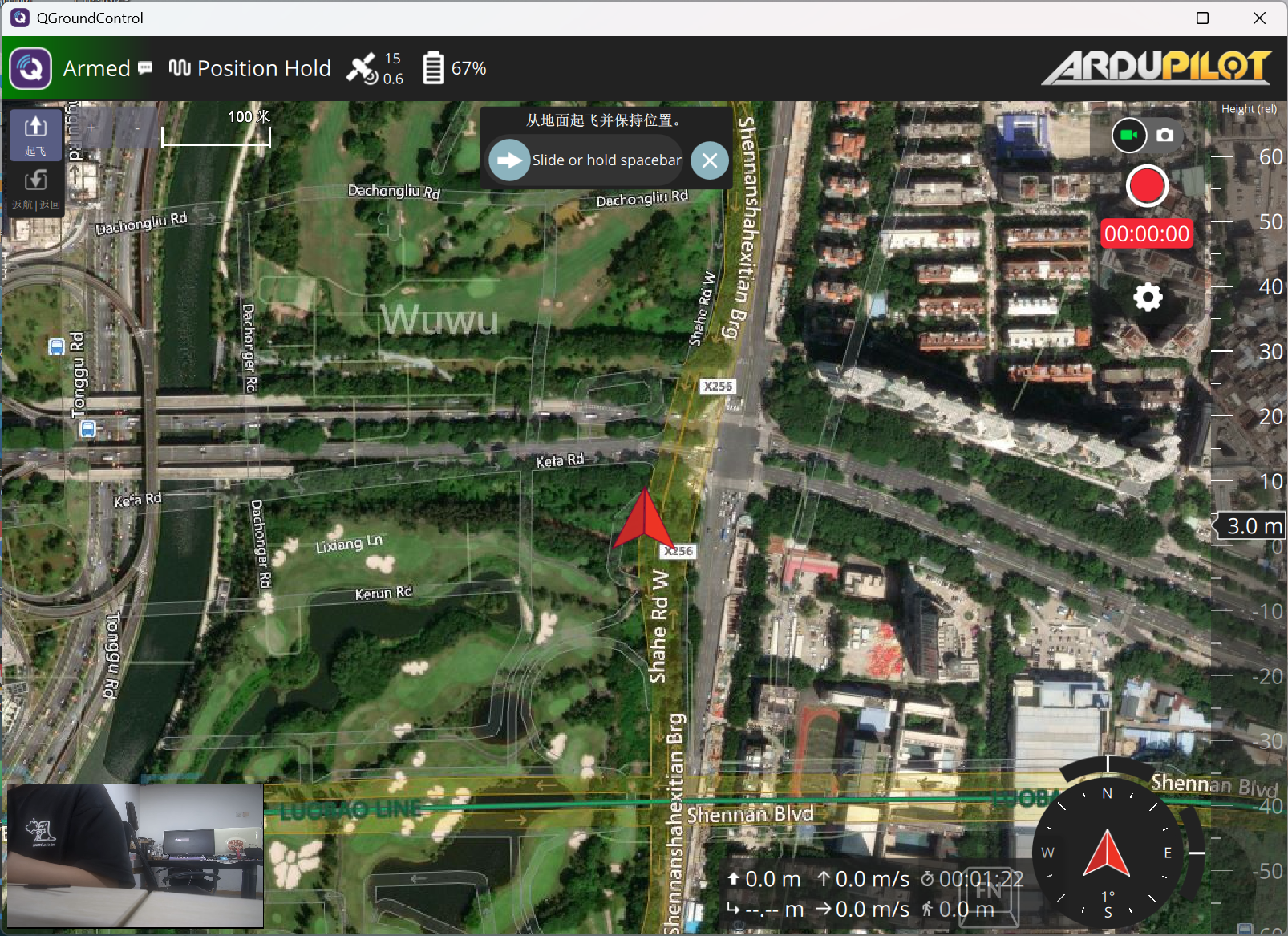
自动起飞功能界面
2.自动降落功能
当飞行器满足自动降落条件时,在地面站软件中点击降落图标,飞行器将在当前飞行位置垂直下降至地面。
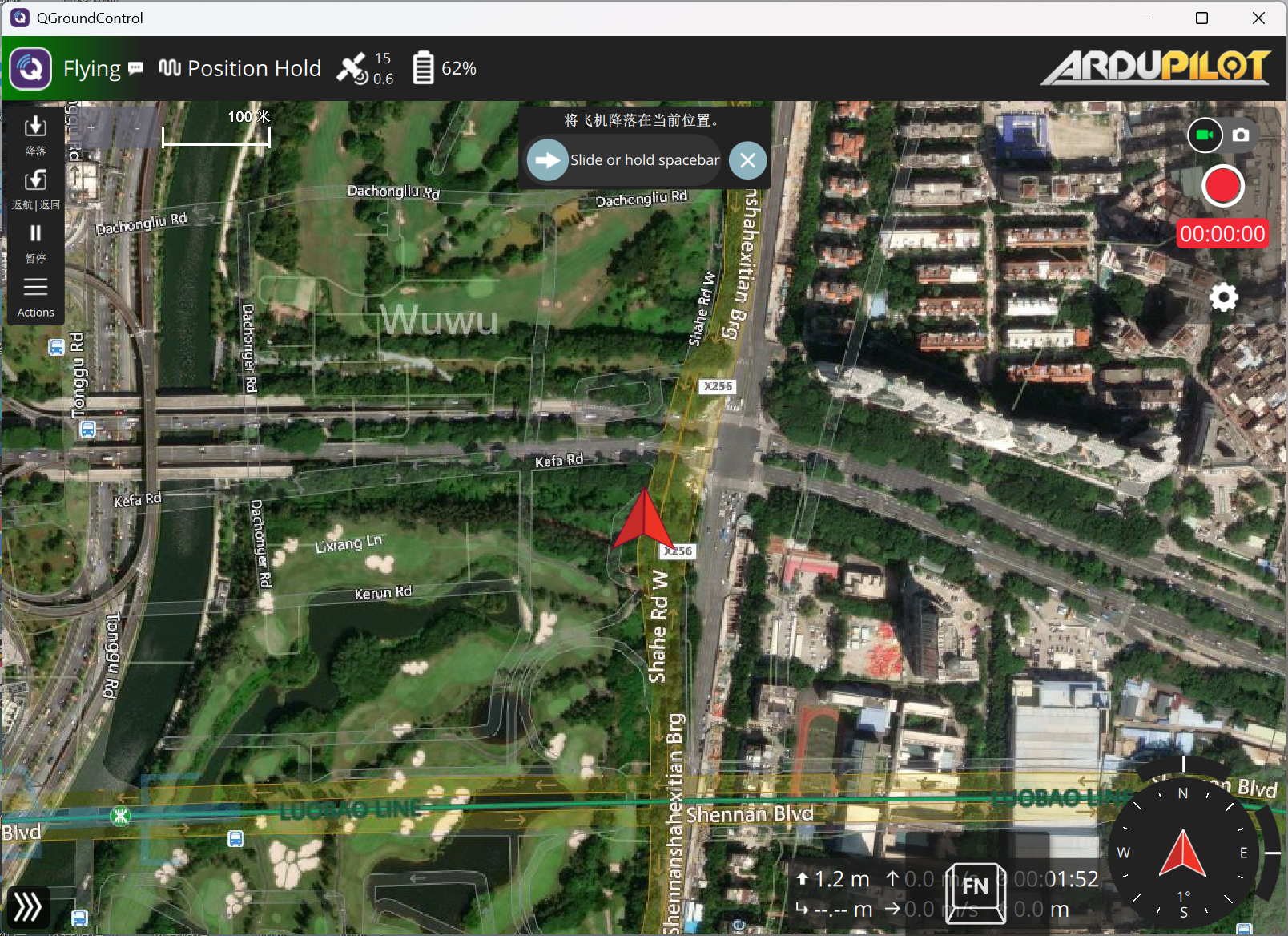
自动降落功能界面
3.自动返航功能
当飞行器在空中飞行时,用户可以单击遥控器上的A键让飞行器进入自动返航,再次单击可暂停自动返航。在返航前,飞行器必须记录一个位置作为home点,默认将起飞点作为home点。当飞行器返航距离D<20米时,无论所设置的返航高度是多少,飞行器都会切换至自动着陆模式,从当前高度返回起飞点降落;当飞行器返航距离D≥20米时,若飞行高度H小于所设置返航高度,则飞行器上升到所设置高度后返回起飞点降落,若飞行高度H大于所设置返航高度,则飞行器直接保持当前高度返回起飞点降落。
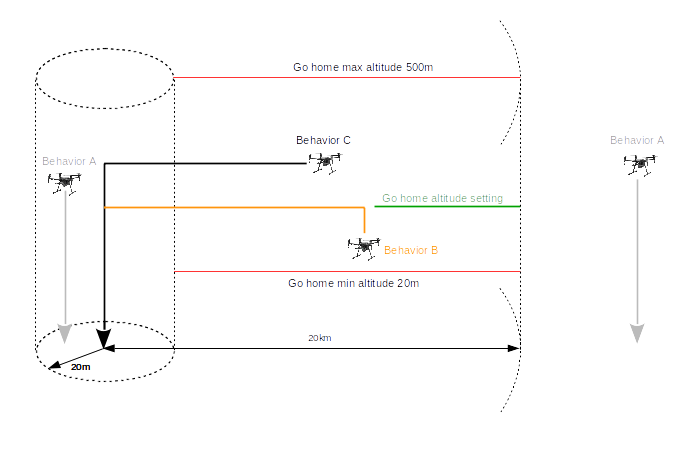
自动返航功能示意图
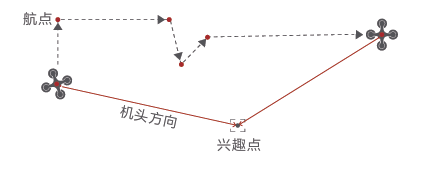
4.航线飞行功能
(1)设点
在地图上可以设置多个飞行航点,飞行器以设置速度沿航点进行航线飞行。飞行中如果框选兴趣点,摄像头将会锁定兴趣点,用户可以下面这种方式进行航线飞行飞行设点:
① 在地图界面点击添加航点。
② 设置航点特征,包括飞行高度、航点动作。
③ 可以将兴趣点图标拖到地图上。
④ 当所有航路点准备就绪时,设置飞行速度、机头朝向等。
⑤ 兴趣点在执行路径点时启用。
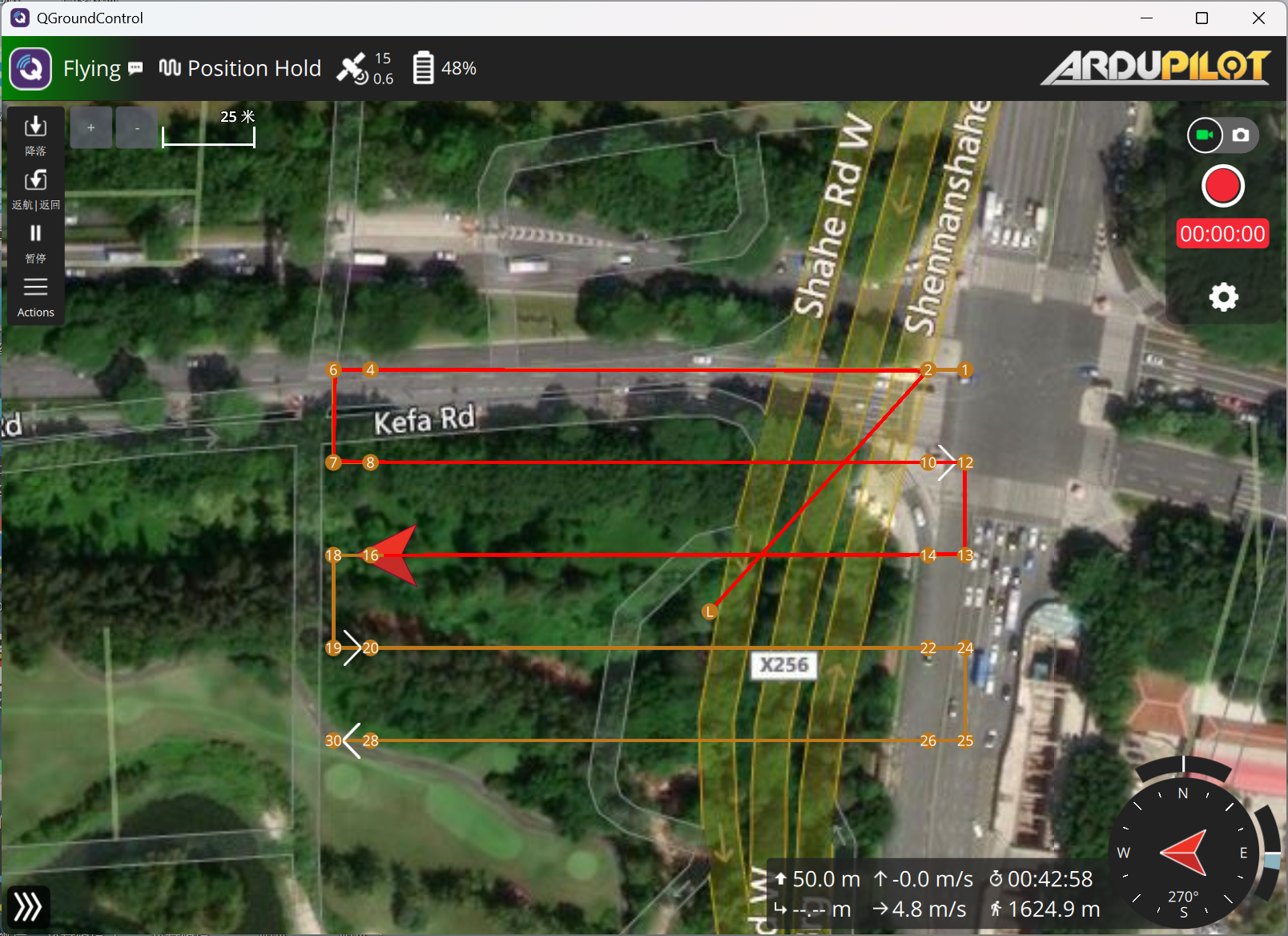
航点任务界面图
(2)历史航线
① 通过收藏可保存历史航线的飞行记录。
② 地面可查看历史飞行的航点特征及航线轨迹。
③ 起飞后可以执行历史航线飞行。
航线飞行示意图
最后编辑:罗创 更新时间:2025-08-15 15:42